
Ich war verzweifelt mit dem Modul RCWL-0516, man konnte ihn nicht unterkontrolle bringen.
Der hat gemacht was er wollte, Ich habe am R-GN auf 1,20 Meter mit 200K eingestellt, gut und schön, es lief erst, und dann hat jemand im Treppenhaus sauber gemacht, und das Modul hat angeschlagen das war ein Abstand von 4,5 Meter, das ist doch ein Witz.
Danach habe ich R9 220 Ohm mit einen Potentiometer ersetzt und das Funktionierte.
Ändern sie den Wiederstand 220 Ohm mit einem Potentiometer. Der Tiefste wert sind 4-5 cm und dann Aufwärts.
Vor kurzem habe ich mir billige Mikrowellen-Radar-Bewegungssensor-Module gekauft. das Mikrowellen-Radarbewegungssensormodul RCWL-0516. Das kompakte Modul verfügt über alle wichtigen Elektronik, einschließlich eines integrierten Tiefspannungsreglers auf dem Chip. Es ist sehr einfach zu bedienen und trivial in den Schlafplatz einer kleinen Projektidee zu spleißen.
RCWL-0516
Dieses Sensormodul wurde als Alternative zu den üblichen PIR-Bewegungssensoren entwickelt, die bei Einbruchmeldealarmen und Sicherheitsleuchten weit verbreitet sind. Wie der PIR-Sensor erkennt auch dieser Sensor nur Bewegungen im Erfassungsbereich. Aber anstatt die schwarze Körperstrahlung einer sich bewegenden Person zu schnüffeln, verwendet dieser Sensor eine „Mikrowellen-Dppler-Radar“-Technik, um bewegte Objekte zu erkennen. Es hat einen Empfindlichkeitsbereich von 7 Metern. Wenn es ausgelöst wird, wechselt sein TTL-Level-Ausgang (OUT)-Pin für eine endliche Zeit (2 bis 3 s) von LOW (0 V) zu HIGH (2 bis 3 s), bevor er in den Leerlauf (LOW) Zustand zurückkehrt.
Hauptmerkmale:
Versorgungsspannung: 4–28 VDC (mit 5 V in meinerWerkstatt getestet)
Betriebsfrequenz: 3,2 GHz (von mir in meiner Werkstatt beobachtet)
Sendeleistung: 20 mW (typisch)/30 mW (max)
Sensing Distance: 5–7 m (>3 m in meiner Werkstatt)
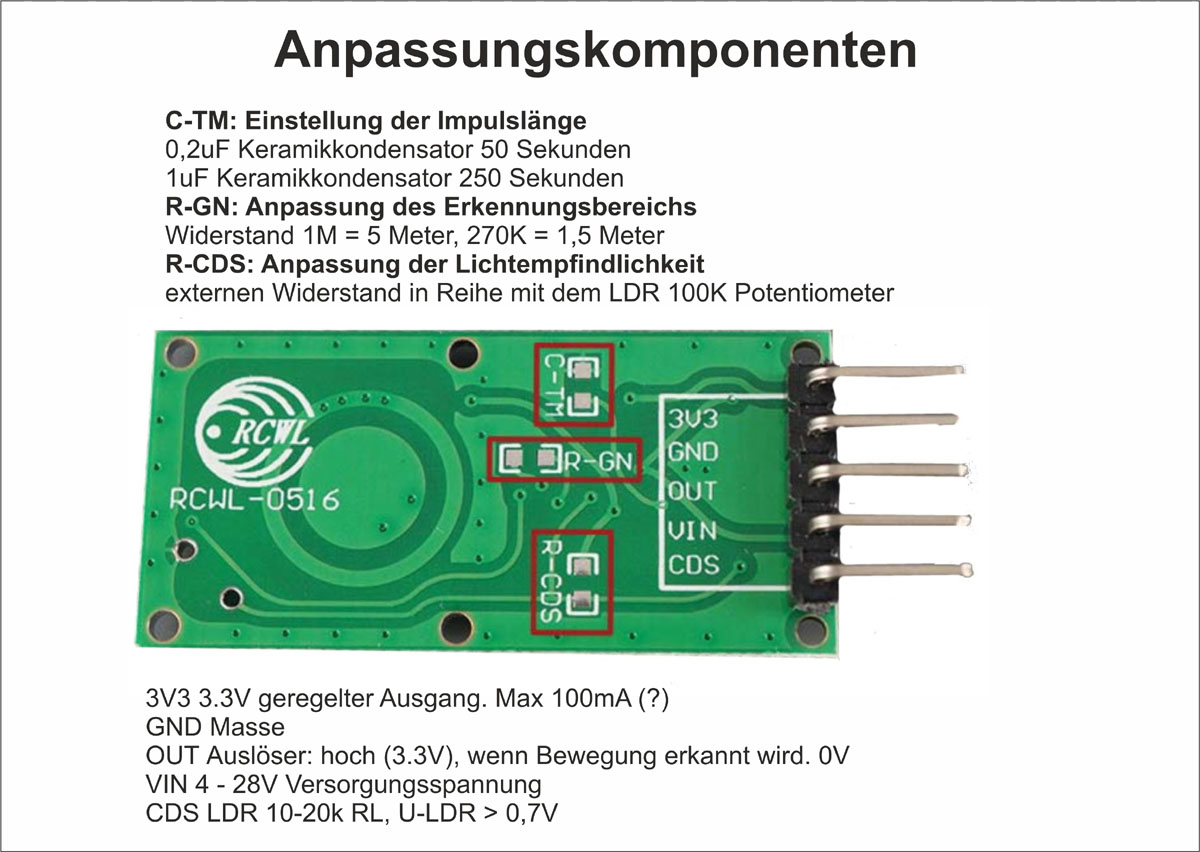
Pinouts:
CDS – Sensorablen-Eingang (niedrig – Abschalter)
VIN – 4- bis 28-V DC-Liefereingang
OUT – HIGH (3.3 V) bewegung erkannt/LOW (0 V)
GND . Boden/0 V
3V3 – geregelter DC-Ausgang (100 mA max)
Dieses flexible Sensormodul kann problemlos in Verbindung mit vielen Mikrocontrollern und auch ohne Mikrocontroller eingesetzt werden. Es kann Stromversorgungseingänge überall von 4 bis 28 V verarbeiten. Der Ausgangsstift kann für eine Vielzahl von Aufgaben verwendet werden, z. B. zum Antrieb einer akustischen/visuellen Anzeige oder sogar die Verknüpfung mit dem I/O eines 3-V-Mikrocontrollers zur Weiterverarbeitung. Vermeiden Sie beim Bau ein Metallteil vor dem Sensormodul. Ebenso immer ein Minimum an 1-cm klarem Platz in der vorderen und hinteren Seite des Moduls.
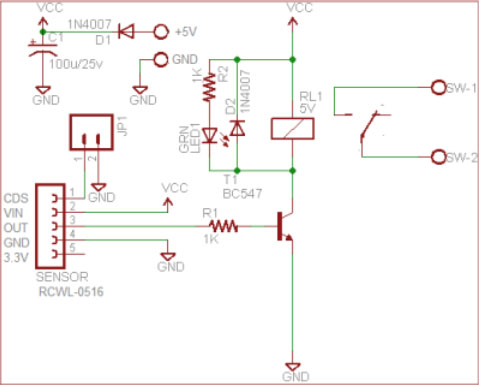
Erste Testschaltung
Bevor Sie sich mit etwas befassen, empfehle ich Ihnen, sich mit der Hardware und dem ersten Setup- / Laufverfahren vertraut zu machen und einige kleine Experimente durchzuführen. Obwohl Sie RCWL-0516 mit nur einem Netzteil und einer angeschlossenen LED verwenden können, fügte ich einen elektromagnetischen Relaistreiberkreis hinzu, um einige externe Belastungen zu steuern, wenn eine gültige Bewegung erkannt wird. Hier beachten Sie, dass der 1-K-Widerstand (R1) nicht notwendig ist, da das Modul bereits einen 1-Kick-Widerstand zwischen dem OUT-Pin und dem tatsächlichen Ausgangsstift des 16-Pin-Board-Chips (RCWL-9196) hielt. Nun zum Schaltplan der ersten Teststrecke:
Das elektromagnetische Relais (RL1) in der Schaltung wird von einem Standard- BC547-Transistor (T1) angetrieben und es gibt eine „Relay on“-Anzeige (LED1), die, wenn das Relais in einem aktiven Zustand ist. Auf Wunsch können Sie auch andere Relais mit einer anderen Versorgungsspannungsrate verwenden. In diesem Fall muss jedoch der Stromversorgungseingang (jetzt 5 V) geändert werden (natürlich mit einigen anderen kleineren Änderungen). Der 2-Pin-Header (JP1) ist für die Zukunft reserviert und nur dann praktisch nutzbar, wenn ein Lichtsensor mit dem Modul verbunden ist.
Bemerkung
Nun – es ist nicht so ein ausgeklügeltes Gerät, dass es irgendeine Art von Reichweitenberechnung gibt – was es erkennt, sind Frequenzänderungen in reflektierten Radiowellen, die durch Bewegung des Reflektors verursacht werden.
So wird die Auslöseschwelle tatsächlich in Bezug auf die Dopplerverschiebung gemessen, und eine Änderung der Schwelle würde die Geschwindigkeit des erkannten Objekts ändern, das für den Auslöser erforderlich ist, hätte aber keine Auswirkungen auf den Verdrängungsabstand (außer vielleicht möglicherweise Zählern der Verschiebung pro Sekunde). Es hat keine Möglichkeiten, irgendeine Art von Entfernung zu messen oder durch eine Änderung bei einem festgelegten Unterschied ausgelöst zu werden. Es ist nur „Messung“ von Störungen durch Reflexionen und Doppler-Effekt, die verursacht werden, wenn etwas in der Nähe des Sensors die Position bei einer bestimmten Rate ändert.
Der geringe Doppler-Frequenzdifferenz wird durch einen Low-Pass-RC-Filter (C9 – 1nF, R3 x 1k, fc – 1/2-RC – 160kHz) extrahiert und durch den RCWL-9196-IC verstärkt und genau gleich wie ein Signal eines PIR-Sensors behandelt.
Theoretisch, wenn Sie die Komponenten des Tiefpassfilters ändern, könnten Sie ändern, welche Frequenzverschiebung erforderlich wäre, um einen Sensor auszulösen, und so ändern, welche Geschwindigkeit für die Auslösung des Sensors erforderlich wäre – aber angesichts der einfachen Natur des Geräts und wie viel des zurückgegebenen Signals eine Multiathinterferenz ist – es ist unwahrscheinlich, dass Sie eine ähnliche Genauigkeit erhalten.etwas mehr von einem Rangefinder. Betrachten Sie dies als einen nicht-sichtslosen PIR-Sensor.